曹璇 房治学 陈拓 陈鑫辉

摘 要:针对火情易发地火灾预测的需求,提出了一种智能消防小车设计方案。该方案首先采用TCRL5000红外反射器设计线路识别电路,PWM技术调控舵机,实现智能消防小车循迹功能;
其次利用DS18B20单总线通信采集温度数据存储至寄存器中,数模转换电路计算MQ-2电压获取环境烟雾浓度;
最后通过Wi-Fi模块将采集到的温度与烟雾浓度发送到上位机,系统判断是否需要发出预警,提醒小车附近人员以此预防火情。实验结果表明,该智能消防小车能够按预设路线正确行驶,完成数据采集与发送、警报提醒任务。
关键词:红外循迹;
温度检测;
烟雾检测;
电机驱动
中图分类号:TN401 文献标志码:A 文章编号:1671-0797(2023)09-0048-04
DOI:10.10.19514/j.cnki.cn32-1628/tm.2023.09.014
0 引言
火灾是对公共安全和社会发展危害最大的灾害之一,人们有时无法及时发现火灾隐患,导致原本可控的火情最后造成惨重的损失。因此,为预防火灾,并能够及时警示人们,本项目设计了一款智能消防小车[1-2]。该方案基于LK32T102,利用温度检测、烟雾检测、红外检测、Wi-Fi模块外围电路,完成智能消防小车信息采集,数据传输至上位机。智能消防小车能让人们第一时间知晓火情信息,预防火灾,将火灾带来的损失和危害降到最低。
本装置主要包括驱动电路、电源模块(LM2596S)、红外循迹模块、温度检测模块(DS18B20,测温范围为-55~125 ℃,精度为±0.5 ℃)、烟雾检测模块(MQ-2,对天然气、液化石油等烟雾气体敏感)、电机驱动模块、Wi-Fi模块。红外循迹模块通过判断两侧接收的红外线强度改变电阻,从而改变反馈给单片机IO口的电压,判断智能消防小车是否按照预设线路行进;
温度检测模块DS18B20传感器采集温度,将环境的温度信息转换成数字量,并以串行数据流的形式反馈给单片机;
烟雾检测模块MQ-2传感器采集烟雾浓度[3],通过改变电路中的电导率,将环境气体的浓度信息反馈给单片机;
电机驱动模块使用A4950控制电机的正转和反转速度,实现小车的不同行进姿态;
Wi-Fi模块将单片机处理完成的数据发送到上位机[4],用于提醒人们智能消防小车所处的环境信息。
1 硬件电路设计
1.1 电路架构
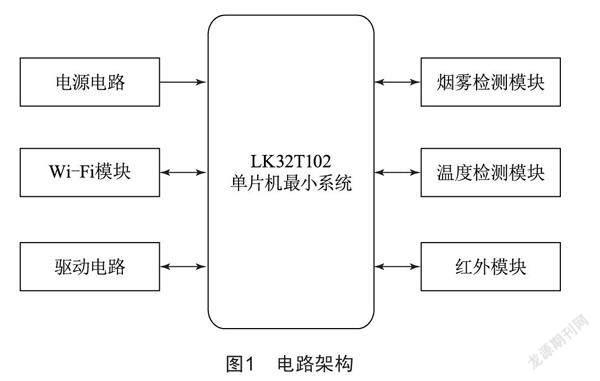
智能消防小车主要由LK32T102单片机、电源电路、Wi-Fi模块、驱动电路、烟雾检测模块、温度检测模块、红外模块组成,如图1所示。
电源降压与稳压电路主要由两块12 V锂电池提供电压,再由LM2596S和AMS1117-3.3芯片转化为5 V和3.3 V电压,为单片机和整个消防小车系统供电[5];
消防小车使用红外模块寻找路线轨迹;
将传感器的各类参数通过Wi-Fi模块显示在上位机上;
使用烟雾检测传感器和温度传感器模块采集周围烟雾浓度和环境温度;
驱动电路用于控制消防小车运动。
1.2 电源模块
电源模块为单片机最小系统,为Wi-Fi模块、温度传感器模块、红外循迹模块、烟雾检测模块提供直流电源。LM2596S与AMS1117模块是业内较为常用的电源变换芯片模块,具有批量大、成本低的特点,适合作为本智能消防小车的电源来使用。通过LM2596S与AMS1117模块将12 V电池降压至5 V和3.3 V两种电压。
1.3 红外循迹模块
传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回來或被反射回来但强度不够大时,光敏三极管处于关断状态,此时模块输出端为低电平,指示二极管处于熄灭状态;
当发射出的红外线在检测范围内遇到障碍物,红外线被反射至传感器接收头,红外循迹模块TCRL5000接收到的信号经过处理,通过斯密特反相器缓冲74HC14,经过插针连接器传递到单片机引脚[6],由单片机获取到的电压值判断智能消防小车的工作状态,调整移动方向,规避障碍物。红外循迹模块电路如图2所示。
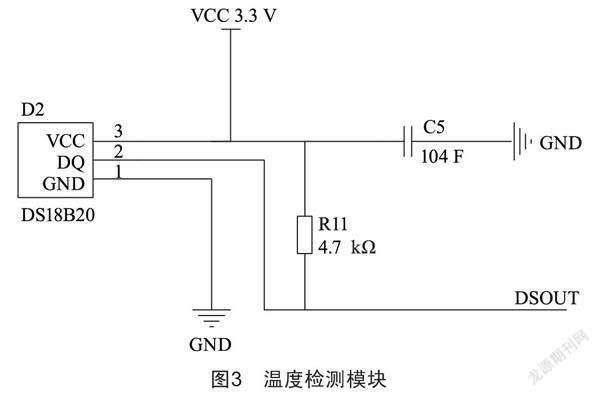
1.4 温度检测模块
温度检测模块使用DS18B20传感器,主要由温度传感器、配置寄存器、异常温度触发器等器件组成,相比于热敏电阻、热电偶等传统的感温元器件,它具有数值化、高精度、强稳定性、体积小等特点,仅需一个控制信号就可以和数据采集系统进行通信,能充分满足本智能消防小车采集温度的要求。采集温度时,模块电路中R11上拉电阻给芯片DQ引脚拉高电位,电容C5用于降低交流脉冲,提高平滑直流输出,如图3所示。
1.5 烟雾检测模块
烟雾检测模块采用MQ-2型传感器采集烟雾浓度,其电导率随着气体浓度的增大而增大,且能够快速地响应烟雾浓度的变化,不易受外界因素干扰。定义烟雾传感器MQ-2输出引脚为SMOKE,SMOKE引脚的电流输出随烟雾浓度变化而变化,读取烟雾检测模块的输出电压值来判断当前的烟雾浓度,如图4所示。
2 控制程序设计
2.1 主程序设计
主函数首先完成单片机的IO端口配置、模块初始化、温度信号采集、烟雾浓度采集,然后以循迹行进为主体,在定时器中断位溢出,进程自增,完成相应的进程操作,传感器获取到数据,判断数据是否超出预设值并做出动作,将数据通过ESP8266模块传输到上位机。流程图如图5所示。
2.2 方向控制程序
舵机控制需要20 ms的时基脉冲,脉冲高电平部分为0.5~2.5 ms范围。通过对定时器时钟源分频计算得出定时器自动重装载值,计算得出单片机定时器计数寄存器捕获值,计算公式如下:
ARR=(T×clk)/(psc+1)-1(1)
CRRx=duty_circle×ARR(2)
式中:ARR为自动重装载值;
T为输入方波周期;
CLK为该单片机时钟频率;
PSC为预分频值;
CRRx为寄存器捕获值;
duty_circle为舵机输入波形占空。
2.3 温度检测程序
DS18B20获取到的数据以补码形式存储,单片机获取到寄存器高8位,判断高8位的值大于7,则表示为正温度,若温度为负,则需先将补码数据减一后取反,以获取负温度的绝对值。将寄存器高8位与低8位合并为一个16位数据,转化为16位数据后,根据温度换算公式转化为摄氏温度,对温度保留两位小数并四舍五入。
2.4 烟雾浓度检测程序
读取MQ-2烟雾传感模块输出引脚SMOKE的电压值,分析气体传感器敏感体表面电阻变化,进而计算得出当前环境烟雾浓度值,计算公式如下:
C=10(lgR-n)/m (3)
式中:C為烟雾浓度;
R为烟雾检测模块中气体传感器敏感体表面电阻;
m、n为常量。
当烟雾浓度超过预设烟雾浓度值的5%时,蜂鸣器自动报警。
3 测试验证
通过电脑热点与小车(图6)配对,连接网络,在上位机中设置对应的IP地址与端口,若有数据传输到屏幕上则为成功。
对Wi-Fi模块ESP8266进行测试,按照芯片手册的指令集,通过TTL串口助手,发送指令给ESP8266,按照流程匹配,连接Wi-Fi,测试与上位机之间的通信。温度检测模块DS18B20,测试时序逻辑是否可以实现数据的通信。烟雾浓度检测模块,通过返回给IO口的电压,经过算法处理后读取到数据。机械温度计和便携式气体检测仪器测量当前环境温度和烟雾气体浓度,作为参照值来测试消防小车温度系统与烟雾浓度采集数据的准确性。温度转化之后延时时间不够,导致温度保持在85 ℃。调整时序延时,除去异常数据后,智能消防小车温度系统与烟雾系统具有较高精度,相比测机械温度计采集的温度平均误差在±0.5 ℃,烟雾系统浓度平均误差在±10-5(±10 ppm)以内。测量结果如表1所示。
4 结语
本文通过设计红外循迹模块、温度检测模块、烟雾检测模块、电机驱动模块等电路模块,研制了智能消防小车。智能消防小车能按照规划路线正常行驶,且上位机可正常接收智能消防小车采集的烟雾、浓度等环境参数,当温度和烟雾浓度存在异常时,能迅速发出警报,提醒人们及时对火灾进行干预处理。智能消防小车可以根据场景规划最优路线,按照规定路线巡查,因而能广泛应用于仓库、工厂、车站等场所,具有良好的应用推广价值。
[参考文献]
[1] 王博,黄国潮,王征.无人快速综合道路检测车系统设计[J].汽车实用技术,2022,47(14):17-20.
[2] 黄畅畅,董丹华,赵江涛,等.基于STM32的循迹防撞系统设计与实现[J].南方农机,2022,53(13):49-51.
[3] 张青超,贺庆,郝思聪,等.低功耗无线烟雾报警器的设计[J].消防科学与技术,2021,40(4):527-530.
[4] 沈靖卫,王成福.防疫填报语音提醒及体温快速测量装置设计[J].金华职业技术学院学报,2021,21(6):47-51.
[5] 刘光能.探究单片机直流稳压电源的硬件系统[J].电子制作,2017(11):73-74.
[6] 巫帮锡,李政,廖杰,等.循迹小车的设计与研究[J].科技与创新,2019(18):90-91.
收稿日期:2023-02-08
作者简介:曹璇(1995—),女,浙江金华人,助理工程师,研究方向:智能应用设计。
基金项目:国家自然基金(62104267);
浙江省大学生新苗人才计划(2022R474A001);
国家级创新创业学院建设校级教改研究项目(CY20221101);
2022年金华市科技局研究项目(20224014)