王世哲, 李宗吉, 王平波, 孙玉臣,3
(1. 海军工程大学兵器工程学院, 湖北 武汉 430033; 2. 海军工程大学电子工程学院, 湖北 武汉 430033; 3. 中国人民解放军92767部队, 山东 青岛 266102)
随着科技的发展,舰炮技术得到了飞速发展,舰炮射击精度[1](即对舰炮海上弹着点进行定位)一直是海上靶场舰炮武器系统[2-4]试验过程中特别关注的问题。弹着点位置测量结果是否及时及准确是影响试验效果的关键因素,只有把位置测量结果及时、准确地传达给指挥员及操作员,才能根据射击偏差[5-7]调整下一次射击,从而提高舰炮射击水平,增强试验意义,也为后续的武器改进优化提供指导意见。
文献[8]结合当前靶场弹着点定位系统的现实情况与存在的问题,较为全面地总结分析了各种弹着点定位方法,给出了各种方法的优缺点及适用情况,最后给出结论:被动声探测技术是解决靶场弹着点定位问题很好的研究方向。文献[9]也说明了基于声学的弹着点定位方案具有较高的准确性与较强的稳定性和可扩展性。
文献[10]按照不同的分类方式对声源定位算法进行了分类。其中,根据定位原理的不同,声源定位算法可分为可控波束形成定位算法、基于高分辨率谱的估计定位算法和基于到达时间差(time difference of arrival, TDOA)的定位算法。基于TDOA的定位算法计算量小,定位精度高,得到了广泛应用。文献[11]给出了基于TDOA定位算法的水声阵列的不同组阵方式,对各种阵型的定位原理进行了推导。
三元阵是一种常见的阵型,文献[12]说明了用三元阵定位时,目标方位不在30°~150°范围内时误差很大,因此30°~150°的目标方位范围可被称为有效观察范围。文献[12]对三元阵定位做出了详细的误差分析。从分析结果可以看出,当弹着点位于中远程时,三元阵测距误差较大,测向误差数值较小。
基于上述研究,本文在三元阵定位的基础上进行了布阵方式的改进,提出了一种基于双十字阵的海上弹着点定位方法,简单阐述了新方法的布阵方案与定位原理,重点对三元阵定位与双十字阵定位误差做了详细分析与仿真,并进行了对比,验证了“定位精度得到提高”的可靠性。
基于双十字阵的海上弹着点定位方法主要有两个创新点:一是采用十字阵(即双三元阵)的布设方式。这样,无论弹着点在哪个方位,总有一个三元阵满足弹着点相对其方位在30°~150°内,将其称作工作三元阵,这种布阵方式打破了30°~150°测向范围的限制,将有效观察范围扩大至360°全方位,也解决了目标“左右舷”模糊的问题,进而减小了定位误差;二是采用双十字阵(即两个十字阵)的布设方式,只利用每个十字阵上工作三元阵的测向功能,采用方位交叉的定位原理,形成的两条方位线的交点即为弹着点位置,这样可以避开三元阵中远程定位时测距误差大的缺点,巧妙应用其测向误差数值较小的优点,提高了定位精度。
该方法的定位原理可分为以下三部分:一是基于北斗差分的十字阵位置精确标定[13-21]。通过北斗差分定位原理可以精确标定水听器阵元的空间位置,得出空间位置坐标;
二是基于北斗测向原理的工作三元阵航向角估计[22-26]。根据北斗测向原理,可得出双十字阵中工作三元阵方向偏离正北方向的夹角;
三是基于单三元阵的目标方位距离估算。假设三元阵被动定位[27]的模型图如图1所示。

图1 三元阵被动定位模型图Fig.1 Diagram of three-element array passive location model
则可推算出弹着点方位距离的精确表达式为
(1)
(2)
式中:φ为待估测爆炸点的方位;R2=R为待估测爆炸点的距离;c为声速;d为阵元间距;τ12表示阵元A、阵元B接收信号的时延差;τ23表示阵元B、阵元C接收信号的时延差;τ13表示阵元A、阵元C接收信号的时延差。
在实际应用场景中,可将弹着点位置视为远场。利用泰勒展开公式,取二阶近似,则弹着点方位距离可近似表达为
(3)
(4)
由式(3)、式(4)可以看出,弹着点在远场时,τ12和τ23很接近,导致测距公式的分母趋近于0,因此距离估计误差很大,而方位估计会更加准确。
在上述三部分定位原理的基础上,可以得出导弹着点位置的原理图,如图2所示。其中,θ1、θ2为两个工作三元阵相对于正北方向的偏角,r、β分别为爆炸点相对靶心的距离和方位,(x1,y1)、(x2,y2)分别为两个十字阵的中心阵元坐标,(x,y)为靶心坐标(已知),(x0,y0)为爆炸点坐标。

图2 弹着点定位原理图Fig.2 Schematic diagram of impact point location
通过推算,在两个中心阵元与爆炸点构成的三角形OSF中,两个底角∠SOF、∠SFO分别为90°-(φ1-θ1)-α、90°-(φ2-θ2)+α。利用三角形几何关系与余弦定理可求出R′,最终可求出爆炸点坐标(x0,y0),进而求出r、β的表达式,可称爆炸点在靶心(r,β)处。
(5)
(6)
(7)
本文提出的基于双十字阵的海上弹着点定位方法,其工作原理本质上是单三元阵的定位原理,也就是说,单三元阵的定位误差决定了双十字阵的定位误差,双十字阵的定位误差分析要在单三元阵定位误差分析的基础上进行。本节对单三元阵与双十字阵的一系列定位误差做了详细仿真分析,并进行了简要对比,表明了双十字阵定位的明显精度优势。声速定为1 500 m/s,三元阵的阵元间距定为10 m。
2.1 单三元阵定位误差
2.1.1 公式近似误差


表1 由公式近似带来的测距误差

表2 公式近似带来的测向误差
由上表可知,在中远距离时,使用近似公式带来的误差可忽略不计,不影响海上弹着点定位的需求。使用近似公式时,随着爆炸点距离的增大,远场平面波近似所带来的误差会变小。
2.1.2 随机误差
测向和测距结果的随机误差主要由声速、各个阵元间的时延差测量结果以及由阵元间距所产生的随机误差[29]引起。
下面推导各因素对结果的影响,重写测向公式:
(8)
假设各项误差彼此独立,对式(8)两边取对数后全微分,并整理,得出式(9)。
式(9)中的第1项是阵元间距d的测量误差,在实际安装时可采用激光定位[30-36]方法,保证Δd<1 mm,而且阵元间距越大,该项误差越小。第2项是声速测量误差[37-42],通常可使其达到0.1%,因此影响不大。第3项、第4项、第5项是时延测量误差,与前两项相比,这三项是主要部分。随着弹着点距离的增大,时延测量误差也会增大,且爆炸声信号的传播也会受海洋环境[43-48]的影响,因此时延估计误差与目标距离、信噪比等多个因素有关,无法给出一个定量的关系式。下文在进行仿真时,对时延估计误差均取一个理想固定值(Δτ=10 μs),且假设信噪比足够高(利于声信号检测[49-51])。
(9)
图3给出了在距离方位不同时由随机误差引起的测向误差图。由图3可知,弹着点方位越接近工作三元阵的正横方向,测向误差越小。在弹着点距离1 000 m、方位接近正横的情形时,测向误差约为0.04°。

图3 距离和方位不同时由随机误差引起的测向误差图Fig.3 Diagram of direction finding error caused by random errors at different distances and azimuths
重写测距公式:
(10)

(11)
与上文分析相同,式(11)的前3项可以忽略,第4项的影响占主要部分。同理,对时延估计误差取一个理想值(Δτ=10 μs),且假设信噪比理想。图4给出了在距离方位不同时由随机误差引起的测距误差图。由图4可以看出,随着距离增大,测距误差增大;弹着点方位越接近工作三元阵的正横方向,测距误差越小。在弹着点距离1 000 m、方位接近正横的情形时,测距误差约为150 m。

图4 距离和方位不同时由随机误差引起的测距误差图Fig.4 Diagram of ranging error caused by random errors at different distances and azimuths
2.1.3 安装误差
在实际安装施工时,3个阵元不可能安装在一条绝对的直线上,且满足阵元间距相等,基阵安装误差会导致很大的测距误差,因此必须进行修正,以减小测距误差[28]。
首先,考虑第1种情况:3个阵元在一条直线上,但阵元位置有偏离,中心阵元B向左平移了距离Δd,阵元间距不相等,如图5所示。
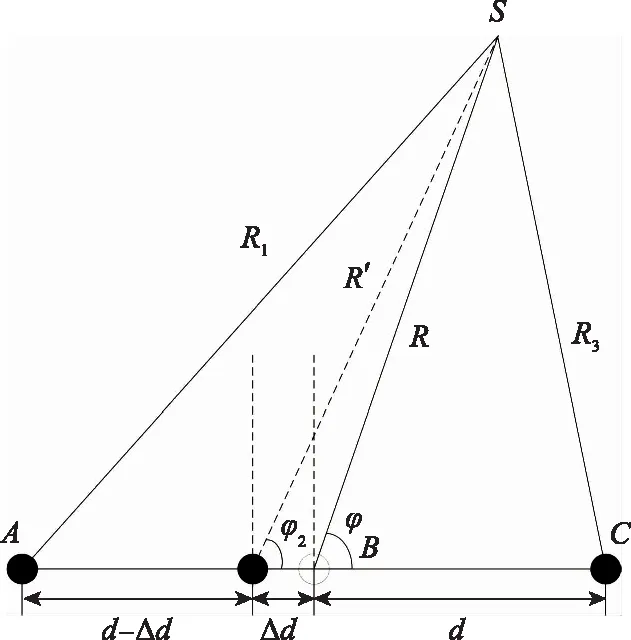
图5 三阵元共线、中心阵元位置有偏离时的阵元配置Fig.5 Array element configuration when the three elements are collinear and the position of the center element is deviated
在这种情况下,阵元A、阵元B的间距变为d-Δd,阵元B、阵元C的间距变为d+Δd,到达阵元B的声程有Δξ的变化,τ12和τ23分别变为
(12)
由此带来了新的时延差测量误差,其变化量如式(13)所示。
(13)
由式(10)、式(11),忽略前3项,只考虑最后一项,φ2≈φ,则有
(14)
(15)
图6、图7分别给出了在弹着点距离1 000 m、方位接近正横的情形时,三阵元共线时由安装误差Δd导致的测距误差与测向误差。

图6 三阵元共线时由安装误差引起的测距误差Fig.6 Ranging error caused by installation error when three array elements are collinear

图7 三阵元共线时由安装误差引起的测向误差Fig.7 Direction finding error caused by installation error when three array elements are collinear
可以看出,在弹着点距离1 000 m、方位接近正横的情形下,当安装误差为20 mm时,对应的测距误差接近4 m,而对应的测向误差数值较小。
其次,考虑第2种情况:3个阵元不在同一直线上,阵元B发生了小的偏移,如图8所示。
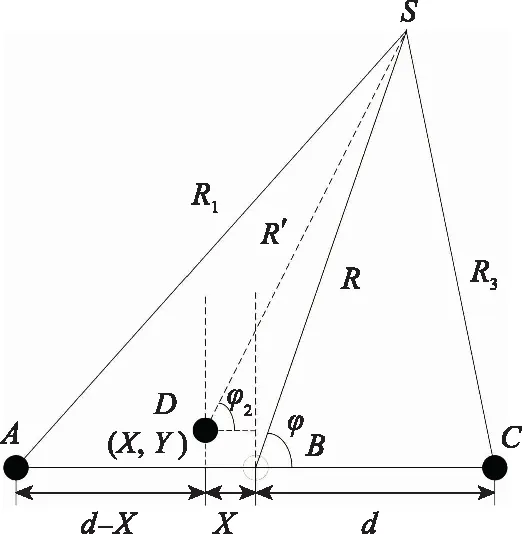
图8 三阵元不共线、中心阵元位置有偏离时的阵元配置Fig.8 Array element configuration when the three elements are not collinear and the position of the center element is deviated
阵元B偏移到D点,设D点坐标为(X,Y)。B点与D点的程差为
Δξ=R-R′
(16)
与上述第1种情况的推导类似,图9与图10给出了阵元B稍有偏离、使阵元A、阵元B、阵元C不在同一直线上时导致的测距误差与测向误差。

图9 三阵元不共线时由安装误差引起的测距误差图Fig.9 Ranging error caused by installation error when the three array elements are not collinear

图10 三阵元不共线时由安装误差引起的测向误差图Fig.10 Direction finding error caused by installation error when the three array elements are not collinear
可以得出,在弹着点距离1 000 m、方位接近正横的情形下,当偏差X、偏差Y均为10 mm时,对应的测距误差很大,而对应的测向误差数值较小。
2.1.4 摇摆误差
第2.1.3节在分析安装误差时,并未考虑阵列受海浪影响发生摇摆的情况,当阵列发生摇摆时,会产生摇摆误差[28]。设工作三元阵方向为x轴,中间阵元位于D(X,Y,Z),如图11所示。
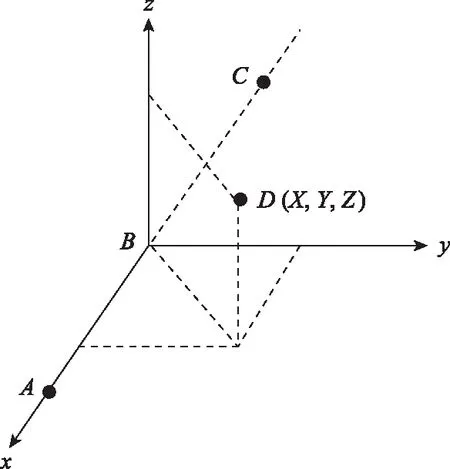
图11 阵元有偏移时的阵几何Fig.11 Array geometry when the array element is offset


图12 阵列有横摇的情况Fig.12 Diagram of the array with roll
(17)
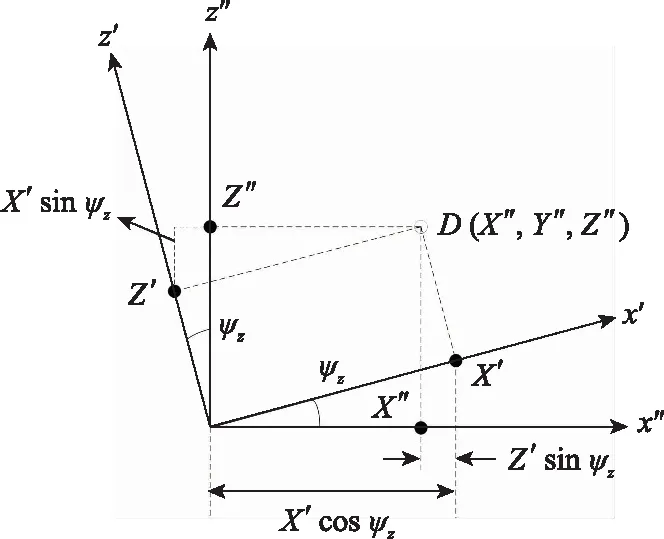
图13 阵列有纵倾的情况Fig.13 Diagram of the array with trim
(18)
将式(17)代入式(18),得到了阵列在纵倾横摇情况下,中间阵元B在坐标系x″y″z″下的位置坐标为
(19)
与第2.1.3节第2种情况的推导类似,可以得出在阵列纵倾横摇情况下,由中间阵元造成的程差变化。
设X、Y、Z的绝对值均为10 mm,图14与图15给出了在弹着点距离为1 000 m、方位接近正横的情形下,不同横摇角与纵倾角的测距误差与测向误差。

图14 不同横摇角与纵倾角时的测距误差图Fig.14 Ranging error graph at different roll and pitch angles

图15 不同横摇角与纵倾角时的测向误差图Fig.15 Direction finding error at different roll and pitch angles
可以得出,当横摇角与纵倾角均为5°时,测距误差很大,而测向误差数值相对较小。
2.2 双十字阵定位误差
由上文可知,在不考虑安装误差与摇摆误差的前提下,采用精确公式,此时误差仅来自随机误差。
当弹着点位于图16所示位置时(弹着点位于靶心附近,靶心相对两个十字阵方位正横,距离1 000 m),假设靶心与双十字阵中心阵元的连线垂直,时延估计误差值与信噪比与上文相同,均为理想值,此时对两个十字阵而言,随机因素带来的测向误差约为0.04°,测距误差约为150 m,ΔR横≈1 000 sin(2×0.04°)=1.4 m为三元阵的横向定位误差,ΔR纵≈2×150=300 m为三元阵的纵向定位误差。
将黄色区域视作单三元阵的定位误差区域,红色区域视作双十字阵的定位误差区域。以图16左侧三元阵的中心阵元为原点,建立直角坐标系,两个十字阵的中心阵元均在X轴上,求得黄色区域面积约为418.88 m2,红色区域面积约为1.95 m2,因此从理论角度分析,该种情况下,定位误差降低为单三元阵定位误差的4.66‰。

图16 双十字阵定位概念图Fig.16 Conceptual diagram of dual cross-array
本文对基于双十字阵的海上弹着点定位原理进行了简要推导阐述,重点对单三元阵定位与双十字阵定位进行了详细的误差分析与仿真。仿真结果表明:在本文分析的算例情况下,基于双十字阵的舰炮海上弹着点定位方法的定位误差降低为单三元阵定位误差的4.66‰,验证了定位方法的正确性、合理性。本文的研究结果为靶场测量舰炮弹着点提供了新思路、新方法,为舰炮射击精度的考评提供了参考依据,也为舰炮武器的生产研发与改进提供了必要保障,对提高部队战斗力具有重要的意义。
猜你喜欢弹着点测距方位认方位幼儿园(2021年12期)2021-11-06类星体的精准测距科学(2020年3期)2020-01-06基于规则形状模拟靶的弹着点快速计算方法指挥控制与仿真(2018年6期)2018-12-03浅析手枪射击技术动作与弹着点的关系当代体育科技(2018年24期)2018-06-11浅谈超声波测距电子制作(2017年7期)2017-06-05借助方位法的拆字中国修辞(2016年0期)2016-03-20机载火炮对地攻击训练弹着点定位法及误差分析装甲兵工程学院学报(2016年5期)2016-03-16基于TMS320C6678的SAR方位向预滤波器的并行实现火控雷达技术(2016年2期)2016-02-06Word Fun小学生时代·大嘴英语(2015年7期)2015-11-23基于PSOC超声测距系统设计浙江理工大学学报(自然科学版)(2015年5期)2015-03-01